
方案介绍
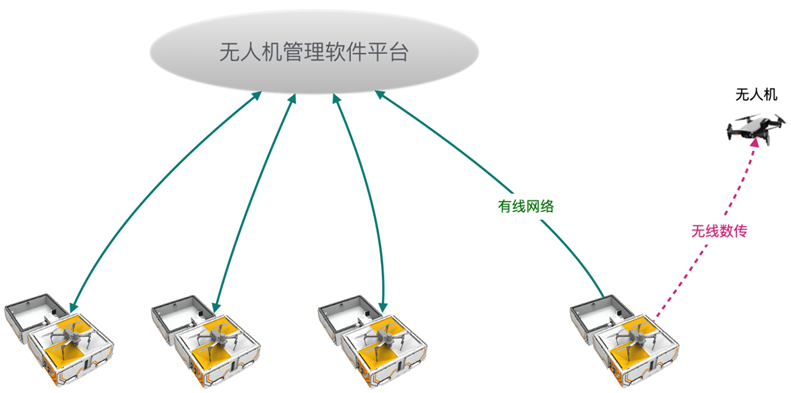
系统由沿线的无人机巢,巢内的无人机以及管理中心的无人机管理软件平台组成。
高速公路、油、气、电管道巡线等场景下,可沿途按一定距离部署无人值守式无人机机巢系统,可利用监控立杆、无人机巢专配立杆、沿途可用建筑顶部等现有基础进行安装部署。机巢可适用于线性巡检目标要素的复杂巡查环境及气候条件,具备防雨、防风、防尘、防雷等特点。能够在恶劣环境中保护好无人机,在气象条件许可时释放无人机进行巡视。该系统可在日常的目标线路巡检中提供动态的视频数据,为整个智慧巡检系统提供实时高效的信息来源。在处理突发事件时,可在第一时间指派最近位置的无人机飞往现场而获得现场信息,为远程指挥提供最快速的信息支持。
蜂巢介绍
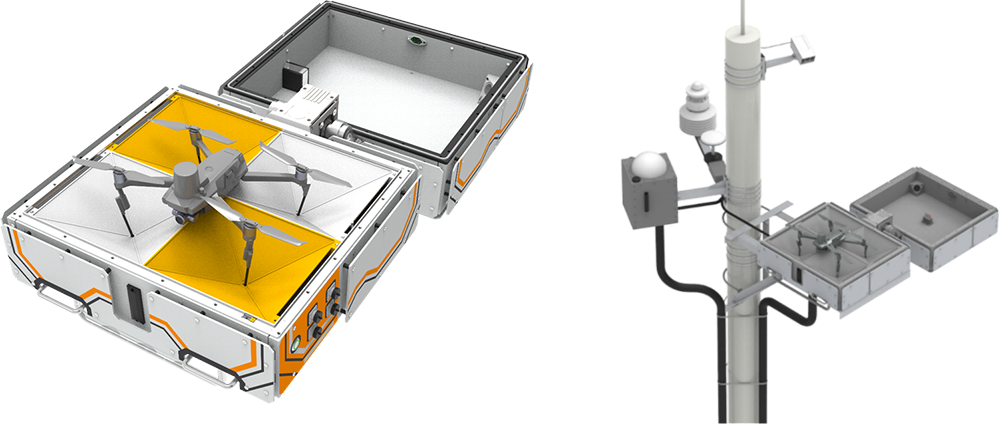
结构轻便
无人机巢为正面开合式设计。整体结构紧凑,体积小,便于运输及工程实施。轻量化设计,对部署基础结构要求低,可以利用现有的监控立杆、照明灯杆、建筑物顶等有一定高度的基础设施安装。部署后,对原基础结构强度、外观无影响。体积小、重量轻,单人即可安装、维护、更换。巡线流程
无人机巢在释放无人机时展开合式蜂巢盖,启动灯光及无线电指示,待无人机起飞后,蜂巢盖自动闭合。当无人机回航接近无人机巢时,再次展开蜂巢盖,启动灯光指示。无人机精准降落后,自动接通充电接口,内置无人机充电及电量管理模块,蛤式蜂巢自动闭合,将无人机保护在封闭空间内。机巣防护
无人机巢集成各种传感器,实时监测内部温湿度、外部温湿度、能见度、风速、降雨状态,能持续监测环境气象变化,具备温控功能,评估无人机出动条件,保证无人机在合适的气象条件下起飞。具有后备电池,外部瞬间断电上电时不会导致系统锁定。自动释放无人机仅在满足电量、通信和气象条件许可时操作。通信功能
无人机巢外可选配置天线追踪设备及高增益天线,可在飞行中调整方向对准无人机,大大提高了通讯距离及稳定性。通过无线图传,可以接收无人机视频,并转发给中心无人机管理平台。无人机巢内置4G或5G通信模组,可直接和中心通信,接收指令,上传视频。带有以太网口,直接接入用户网络。将蜂巢信息、无人机视频等业务数据传输到中心无人机管理平台。
无人机选型
无人机采用商用成熟度极高的小型四旋翼结构,轻量化、微型化、可折叠设计。内置视觉识别精准降落系统,可在起飞时和降落时对比记录的地面纹理信息进一步提高降落精度,满足机巢平台上精准降落。机身上、下、左右、分别搭载全向障碍物感知系统,具备全向环境感知能力,能在大部分飞行环境中提供有效的辅助保护。结合路径规划和精准定位能力,可有效避免意外的发生。即使发生意外,也不会对地面造成事故。无人机携带高清摄像机,具有变焦和俯仰云台功能,拍摄和回传高清的视频流。图数传系统具备2.4/5.8GHz双频自动切换功能,抗干扰能力强,可保证半径5公里稳定传输全高清720P视频。 无人机可以换装搭载热成像相机,用于读取场景内温度。平台介绍

管理平台
中心的无人机管理软件平台提供基于GIS的管理界面,可依据权限接入、配置无人机巢及其置的无人机。可以依据现场情况规划无人机巡视路径,包括水平坐标连线、飞行高度、各段速度、飞行姿态等。也可记录人工操作的飞行轨迹,保存为巡视路线。巡视路线可以下发给指定的无人机巢,并安排为定时计划任务。规划完成后可重复、定时自动执行。在偶遇突发事件,也可临时规划应急任务航线,由事故点坐标和出警级别触发,指派就近无人机立刻飞往现场留空观察。
无人机巢内部和无人机出动的视频可以从无人机巢的固定相机回传。无人机机载摄像机图像、热成像图像等均可回传中心,并显示在指定终端电脑。无人机的操作日志、视频记录可保存和查询。
应用场景
日常飞行巡视/巡查
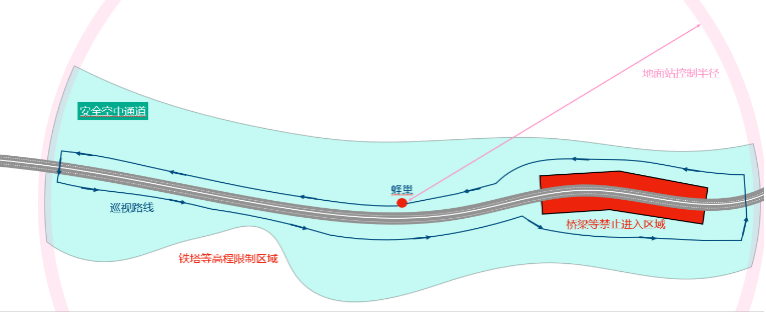
无人机蜂巢部署之后,技术人员会根据该蜂巢覆盖半径内的目标线路周边环境进行考察和标定,制定好无人机飞行的安全“空中通道”,该“空中通道”按照经纬度和高程两个维度来设置,用以避开一些不可进入的区域。
日常巡视飞行可以由客户在后端平台上,规划无人机在“空中通道”内巡视的任务。该任务可以包括飞行路线、分段设置飞行高度、飞行速度、机载相机方位角、机载相机俯瞰角度、指定地点悬停、指定区域拍照等。规划任务可按照每天定时执行,也可由其它任务机制触发执行。一旦任务下发,蜂巢将会展开,释放无人机,无人机按照任务执行完成,自动返回蜂巢。巡视任务通常会避开目标线路正上方、高压供电线、隧道、山口、大型桥梁等容易产生切变风的区域。
日常巡视时,视频将会连续回传到蜂巢,并转发到中心,可在中心平台上看到实时视频。按照规则拍摄的照片也会通过网络传输到中心平台。这些数据可以用做电视监控或者视频智能分析。
应用场景
现场勘查及监视场景
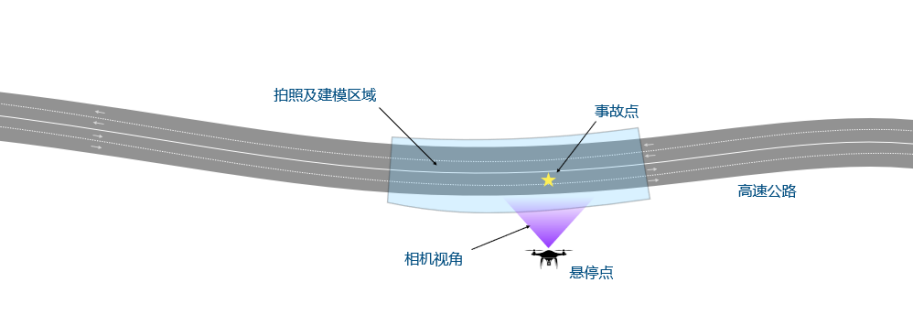
如果目标线路巡检中出现意外事故,可以通过中心平台快速呼唤无人机到达现场。事故点的位置可在电子地图上直接点选,同时可指定监视高度、角度、是否环绕,是否多角度拍照,系统自动生成飞行任务下发到最近的蜂巢。无人机从蜂巢起飞后到达点选位置,按照任务执行。如果发现地图点选位置有偏差,可以再次在平台上指定偏移方向和距离,调整无人机位置和拍摄角度。事故现场可以是一个点,也可以是一个可拖动调整的区域。
系统可预定多种任务模式功能:例如无人机将执行现场“瓦片式”覆盖拍照;环绕飞行拍摄多角度视频;在完成初步任务后悬停监控,直到收到下一步指示或者电量消耗至维持返航余量位置等任务操作等。